
I'm John-Paul Ore, an assistant professor of computer science at the North Carolina State University I have a B.A. in Philosophy from the University of Chicago.
I work on robots because robots can help us overcome the world's vital challenges: our changing climate, food production, nuclear responsibilities, exploring space, environmental monitoring, and liberating people from dangerous, dirty, and dull work.
I am actively recruiting motivated PhD students to join my lab. If you're interested, please contact me at jwore at ncsu dot edu.

Background
Research Interests
My research interests focus on applying program analysis techniques to software that controls robots and senses and acts in the physical world. This includes abstract type inference of physical unit types (like 'meters-per-second') with dataflow analysis, Probabilistic techniques for combining semantic information in identifiers (variable names) with code flow inference, and empirical measurements of how developers make decisions about robotic software, and how to connect program analysis with robotic simulation. I'm specifically focused on program analysis and software testing that helps make systems safer and more reliable while remaining practical and economically efficient.
I seek to accelerate and amplify the processes and tools that can be a catalyst for new capabilities.
PUBLICATIONS
2021
- An Empirical Study on Physical Type Annotations: Accuracy, Speed, and Suggestion Effectiveness
- Automated Object Manipulation Using Vision-based Mobile Robotic System for Construction Applications
-
Assessing the Type Annotation Burden
ASE 2018 Automated Software Engineering -
Phys: Probabilistic Physical Unit Assignment and Inconsistency Detection
FSE 2018 Foundations of Software Engineering -
Towards Code-Aware Robotic Simulation
1st International Workshop on Robotics Software Engineering (RoSE) -
Sensing Water Properties at Precise Depths from the Air (Journal Version)
Journal of Field Robotics
-
Sensing Water Properties at Precise Depths from the Air
FSR'17 - Field and Service Robotics
@InProceedings{10.1007/978-3-319-67361-5_14,
author="Ore, John-Paul
and Detweiler, Carrick",
editor="Hutter, Marco
and Siegwart, Roland",
title="Sensing Water Properties at Precise Depths from the Air",
booktitle="Field and Service Robotics",
year="2018",
publisher="Springer International Publishing",
address="Cham",
pages="205--220",
isbn="978-3-319-67361-5"
}
-
Dimensional Inconsistencies in Code and ROS Messages: a Study of 5.9M Lines of Code
IROS'17 - International Conference on Intelligent Robots and Systems
@INPROCEEDINGS{8202229,
author={J. P. Ore and S. Elbaum and C. Detweiler},
booktitle={2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
title={Dimensional inconsistencies in code and ROS messages: A study of 5.9M lines of code},
year={2017},
volume={},
number={},
pages={712-718},
keywords={control engineering computing;operating systems (computers);robot programming;source code (software);ROS classes;ROS code;ROS messages;ROS programs;ROS software;dimensional analysis;dimensional inconsistencies;inconsistencies detection;inconsistency type;physical quantities;physical unit manipulation;robot operating system;robot software;C++ languages;Geometry;Libraries;Meters;Robots;Software;Tools},
doi={10.1109/IROS.2017.8202229},
ISSN={},
month={Sept}}
-
Lightweight Detection of Physical Unit Inconsistencies without Program Annotations
ISSTA`17 - International Symposium on Software Testing and Analysis
@inproceedings{Ore:2017:LDP:3092703.3092722,
author = {Ore, John-Paul and Detweiler, Carrick and Elbaum, Sebastian},
title = {Lightweight Detection of Physical Unit Inconsistencies Without Program Annotations},
booktitle = {Proceedings of the 26th ACM SIGSOFT International Symposium on Software Testing and Analysis},
series = {ISSTA 2017},
year = {2017},
isbn = {978-1-4503-5076-1},
location = {Santa Barbara, CA, USA},
pages = {341--351},
numpages = {11},
url = {http://doi.acm.org/10.1145/3092703.3092722},
doi = {10.1145/3092703.3092722},
acmid = {3092722},
publisher = {ACM},
address = {New York, NY, USA},
keywords = {dimensional analysis, physical units, program analysis, robotic systems, static analysis, type checking, unit consistency}} -
Phriky-Units: a Lightweight, Annotation-Free Physical Unit Inconsistency Detection Tool
Best Tool Demonstration Award, ISSTA'17
ISSTA`17 - Demonstration Track
@inproceedings{Ore:2017:PLA:3092703.3098219,
author = {Ore, John-Paul and Detweiler, Carrick and Elbaum, Sebastian},
title = {Phriky-units: A Lightweight, Annotation-free Physical Unit Inconsistency Detection Tool},
booktitle = {Proceedings of the 26th ACM SIGSOFT International Symposium on Software Testing and Analysis},
series = {ISSTA 2017},
year = {2017},
isbn = {978-1-4503-5076-1},
location = {Santa Barbara, CA, USA},
pages = {352--355},
numpages = {4},
url = {http://doi.acm.org/10.1145/3092703.3098219},
doi = {10.1145/3092703.3098219},
acmid = {3098219},
publisher = {ACM},
address = {New York, NY, USA},
keywords = {dimensional analysis, physical units, program analysis, robotic systems, static analysis, type checking, unit consistency} }
-
Obtaining the Thermal Structure of Lakes from the Air.
Water@Article{w7116467,
AUTHOR = {Chung, Michaella and Detweiler, Carrick and Hamilton, Michael and Higgins, James and Ore, John-Paul and Thompson, Sally},
TITLE = {Obtaining the Thermal Structure of Lakes from the Air},
JOURNAL = {Water},
VOLUME = {7},
YEAR = {2015},
NUMBER = {11},
PAGES = {6467},
URL = {http://www.mdpi.com/2073-4441/7/11/6467},
ISSN = {2073-4441},
DOI = {10.3390/w7116467}
}
-
Autonomous Aerial Water Sampling.
Journal of Field Robotics@article{ore2015autonomous, title={Autonomous aerial water sampling},
author={Ore, John-Paul and Elbaum, Sebastian and Burgin, Amy and Detweiler, Carrick},
journal={Journal of Field Robotics},
volume={32},
number={8},
pages={1095--1113},
year={2015},
publisher={Wiley Online Library}
} -
Bringing Unmanned Aerial Systems Closer to the Environment.
Cambridge Journal of Environmental Practice@article{detweiler2015environmental,
title={ENVIRONMENTAL REVIEWS AND CASE STUDIES: Bringing Unmanned Aerial Systems Closer to the Environment},
author={Detweiler, Carrick and Ore, John-Paul and Anthony, David and Elbaum, Sebastian and Burgin, Amy and Lorenz, Aaron},
journal={Environmental Practice},
volume={17},
number={3},
pages={188--200},
year={2015},
publisher={Taylor \& Francis}
}- Surface Classification for Sensor Deployment from UAV Landings.
ICRA - Proceedings of IEEE International Conference on Robotics and Automation Seattle, Washington@inproceedings{anthony2015surface,
title={Surface classification for sensor deployment from UAV landings},
author={Anthony, David and Basha, Elizabeth and Ostdiek, Jared and Ore, John-Paul and Detweiler, Carrick},
booktitle={Robotics and Automation (ICRA), 2015 IEEE International Conference on},
pages={3464--3470},
year={2015},
organization={IEEE}
}- On Air-to-Water Radio Communication between UAVs and Water Sensor Networks.
ICRA - Proceedings of IEEE International Conference on Robotics and Automation Seattle, Washington, 2015.@inproceedings{palmer2015air,
title={On air-to-water radio communication between UAVs and water sensor networks},
author={Palmer, Jacob and Yuen, Nicholas and Ore, John-Paul and Detweiler, Carrick and Basha, Elizabeth},
booktitle={Robotics and Automation (ICRA), 2015 IEEE International Conference on},
pages={5311--5317},
year={2015},
organization={IEEE}
} - Surface Classification for Sensor Deployment from UAV Landings.
-
Controlled Sensor Network Installation with Unmanned Aerial Vehicles.
ACM Conference on Embedded Networked Sensor Systems (SenSys) , Memphis, TN.@inproceedings{anthony2014controlled,
title={Controlled sensor network installation with unmanned aerial vehicles},
author={Anthony, David and Ore, John-Paul and Detweiler, Carrick and Basha, Elizabeth},
booktitle={Proceedings of the 12th ACM Conference on Embedded Network Sensor Systems},
pages={348--349},
year={2014},
organization={ACM}
}
-
Autonomous Aerial Water Sampling (link to journal version).
FSR'13 -Field and Service Robotics. Brisbane, Australia
MISCELLANEOUS PUBLICATIONS
-
An airborne robotic platform for mapping thermal structure in surface water bodies.
In AGU Fall Meeting Abstracts. 2015.@inproceedings{thompson2015airborne,
title={An airborne robotic platform for mapping thermal structure in surface water bodies},
author={Thompson, SE and Chung, M and Detweiler, C and Ore, JP},
booktitle={AGU Fall Meeting Abstracts},
year={2015}
} -
Co-Aerial Ecologist
Poster at National Robotics Initiative - Primary Investigators Meeting, Washington DC, 2015. -
Towards Monitoring Saline Wetlands with Micro UAVs.
Robot Science and Systems Workshop on Robotic Monitoring Berkeley, California, 2014.@inproceedings{ore2014towards,
title={Towards monitoring saline wetlands with micro uavs},
author={Ore, JPWC and Burgin, Amy and Schoepfer, Valerie and Detweiler, Carrick},
booktitle={Robot Science and Systems Workshop on Robotic Monitoring, Berkeley, California},
year={2014}
} -
Sensor Installation via UAVs for Environmental Monitoring.
Robot Science and Systems Workshop on Robotic Monitoring, Berkeley, California, 2014. -
Using Unmanned Aerial Vehicles (UAVs) to Map Sources of Groundwater in a Saline Wetland.
Poster presentation at the Joint Aquatic Sciences Meeting, Portland, OR 18-23 June 2014. -
Towards Autonomous Aerial Water Sampling.
Robot Science and Systems Workshop on Robotics for Environmental Monitoring Berlin, Germany, 2013.
TEACHING AND MENTORING

FEEDBACK FROM STUDENTS:
AWARDS AND FUNDING
PATENTS

TOOLS
TALKS

SERVICE
MEMBERSHIPS
CERTIFICATIONS

VIDEOS
PROJECTS
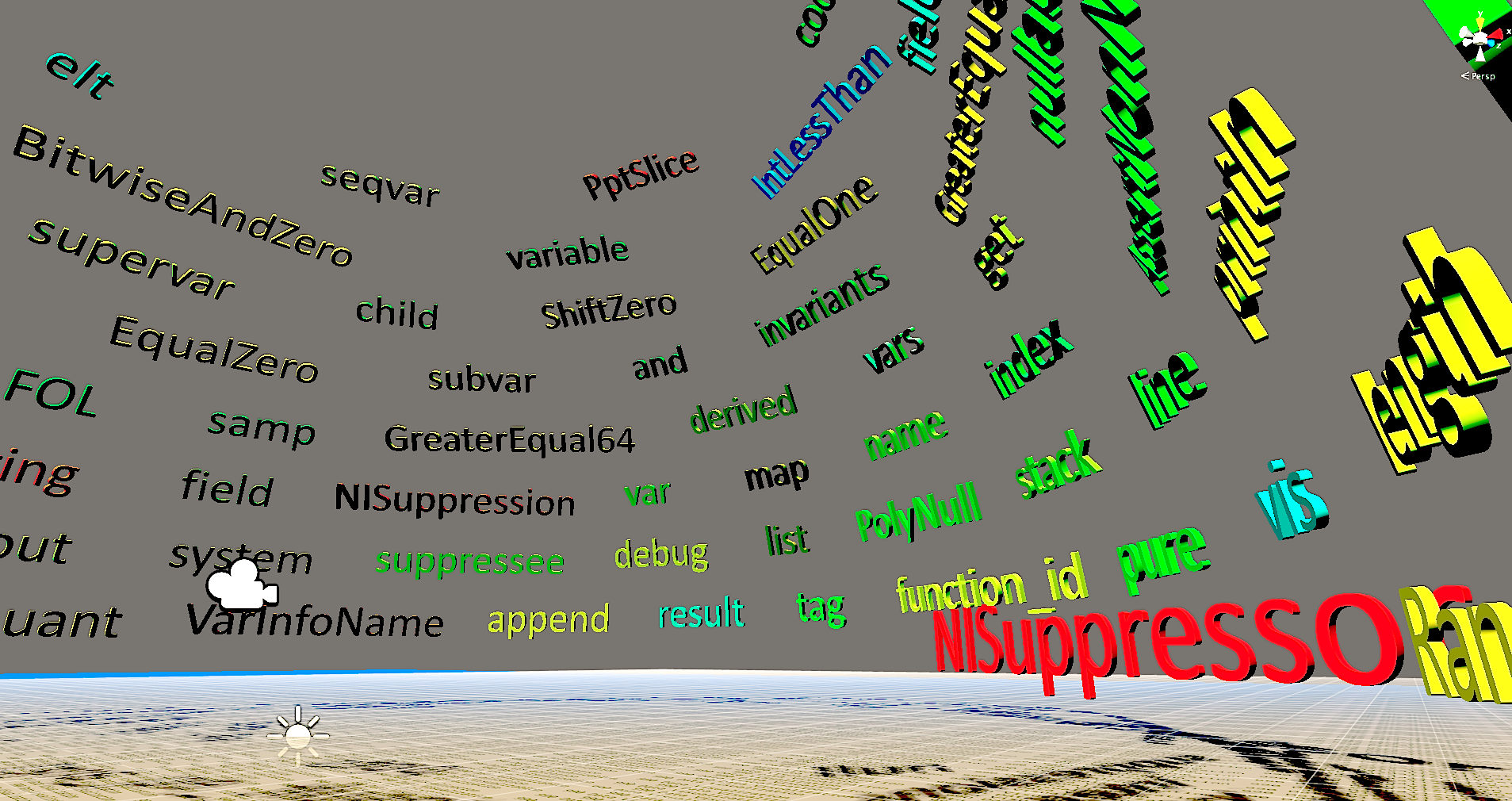
2014 Class Project: Virtual Reality (Unity) 3-D rendering of Text Clouds for source code visualization with the Oculus Rift DK1 (2014). Class project experiment with using virtual reality for program comprehension. Word color is the identifier type, font size is based on word frequency (TD-IDF).
2015 Project experimenting with spatial logics to predict spatio-temporal regions where two UAVs might collide. (Matlab)
PERSONAL
Hiking, travelling, cycling, cuisine, photography, and birding.